
Sparse ActionGen: Accelerating Diffusion Policy with Real-time Pruning
Published in International Conference on Machine Learning 2026 (ICML 2026), 2026
Recommended citation: Kangye Ji, Jianbo Zhou, Yuan Meng, Ye Li, Hanyun Cui, Zhi Wang. "Sparse ActionGen: Accelerating Diffusion Policy with Real-time Pruning." ICML 2026. https://arxiv.org/abs/2601.12894
Diffusion Policy dominates action generation thanks to its strong modeling of multi-modal action distributions, but its multi-step denoising makes it impractical for real-time visuomotor control. Existing caching-based accelerators rely on static schedules that fail to adapt to the dynamics of robot-environment interactions, leading to suboptimal performance.
SAG (Sparse ActionGen) enables extremely sparse action generation:
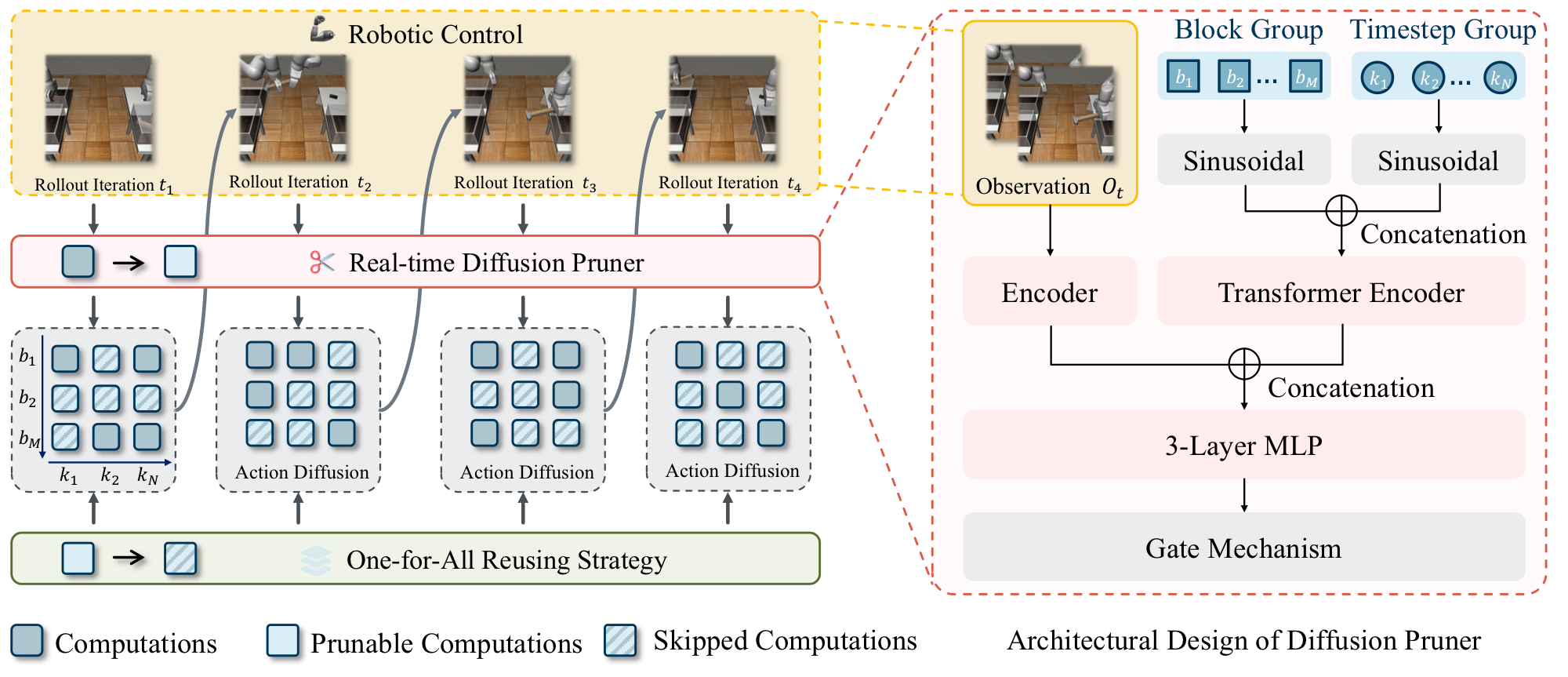
- Rollout-adaptive prune-then-reuse. It first identifies prunable computations globally, then reuses cached activations to substitute them during action diffusion.
- Observation-conditioned diffusion pruner. A highly parameter- and inference-efficient pruner adapts to each rollout’s observations for environment-aware, real-time prediction.
- One-for-all reuse. Activations are reused across both timesteps and blocks in a zig-zag manner, minimizing global redundancy.
Across multiple robotic benchmarks, SAG achieves up to 4× generation speedup without sacrificing performance.